
ACサーボモータコントローラの機能
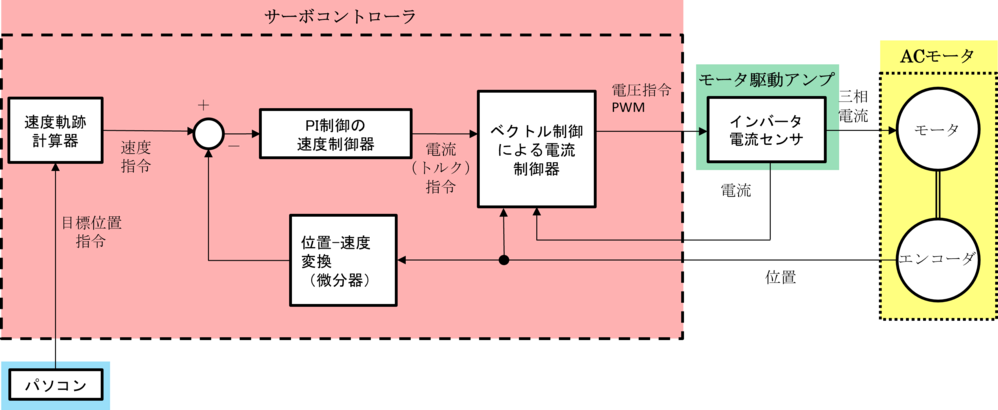
試作したACサーボモータコントローラのシステム構成要素の機能は次のようになっている。
1.パソコンパソコンからUSBでサーボコントローラに目標位置指令のコマンドを送る。
2.サーボコントローラ速度軌跡計算器とPI制御の速度制御器、ベクトル制御による電流(トルク)制御器から構成される。
まず、パソコンから送られてきた目標位置へ向かうためにモータ速度を時間に対してどのように変えていくかの軌跡の計算を行い、次に、計算で得られた速度軌跡(速度指令値)にモータ速度を追従させる制御(PI制御)の演算を行い、モータに必要な電流(トルク)の指令値を算出する。最後に、モータ電流ベクトル制御によりモータ電流(トルク)が指令値通りになるようなモータ駆動電圧指令値を算出し、PWM信号としてモータ駆動アンプへ出力する。
モータ速度は、モータ付属のロータ位置検出器(ロータリエンコーダ)より取得した位置情報から算出する。
サーボコントローラからモータ駆動電圧指令をPWM信号で受け取り、それに従って三相インバータを動作させることによって、ACモータへ指令通りの三相交流電圧・電流を出力して駆動する。
また、各相の電流値をセンシングしてサーボコントローラへフィードバックする。
三相交流にて駆動される。
出力軸にロータリエンコーダを取り付けてロータ位置検出を行い、サーボコントローラへフィードバックする。
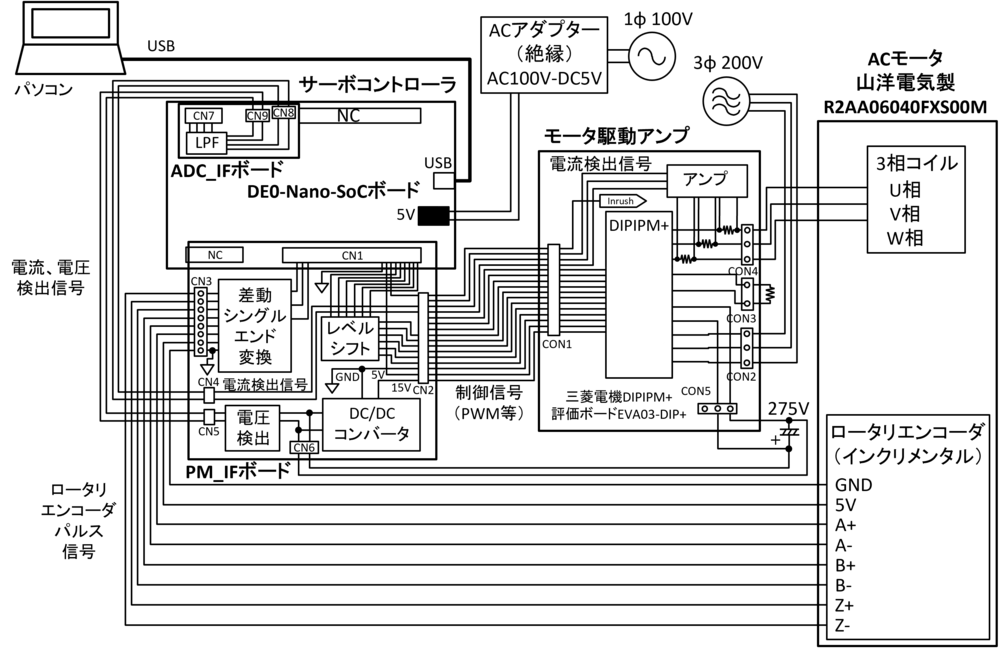
ハードウェア構成
ハードウェアの構成要素は、ACモータ、サーボコントローラ、モータ駆動アンプ、PM_IFボード、ADC_IFボードとなっている。
ACモータは、山洋電気製R2AA06040FXS00Mを使用した。最大連続トルク1.27Nm、定格回転数3000rpm、ロータ位置検出器として2000P/Rのインクリメンタル形ロータリエンコーダが取り付けられている。
PM_IFボードは、信号のレベル(電圧)や伝送方式の変換などサーボコントローラとモータ駆動アンプ、ロータ位置検出器の間の仲立ち等を行う。
ADC_IFボードは、サーボコントローラに搭載されたAD変換器への入力信号のフィルタリング等を行う。
サーボコントローラ、モータ駆動アンプについての詳細は後述する。
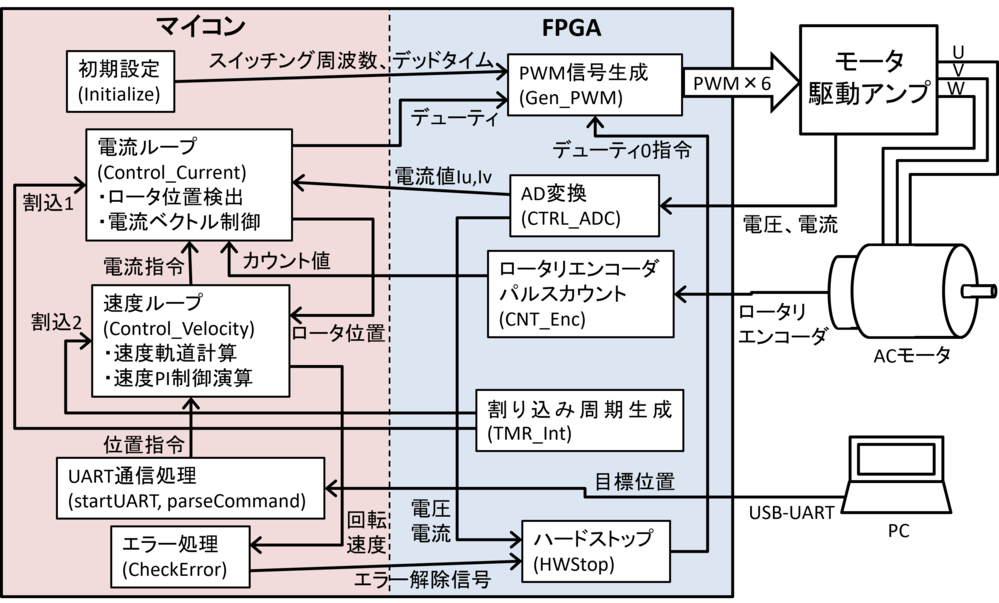
ソフトウェア構成
サーボコントローラのソフトウェアの構成要素は、FPGAで作成されるモジュールによる機能とマイコンのプログラムによって実装される機能の2種類に分かれている。
FPGAで実装する機能の構成要素は、モータ駆動アンプの三相インバータを駆動するPWM信号の生成、AD変換器の制御や結果取得、ロータリエンコーダの出力パルス信号カウント、マイコンの割り込み処理周期信号生成、異常発生時のハードストップとなっており、高速動作が必要なものや、周期的な単純動作の繰り返しであるものが中心となっている。
マイコンで実装する機能の構成要素は、初期設定、電流ループ(ロータ位置検出、電流ベクトル制御)、速度ループ(速度軌跡計算、速度PI制御演算)、パソコンとのUART通信処理、エラー処理となっており、複雑な数値演算が必要なものなど比較的高度な処理で構成されている。
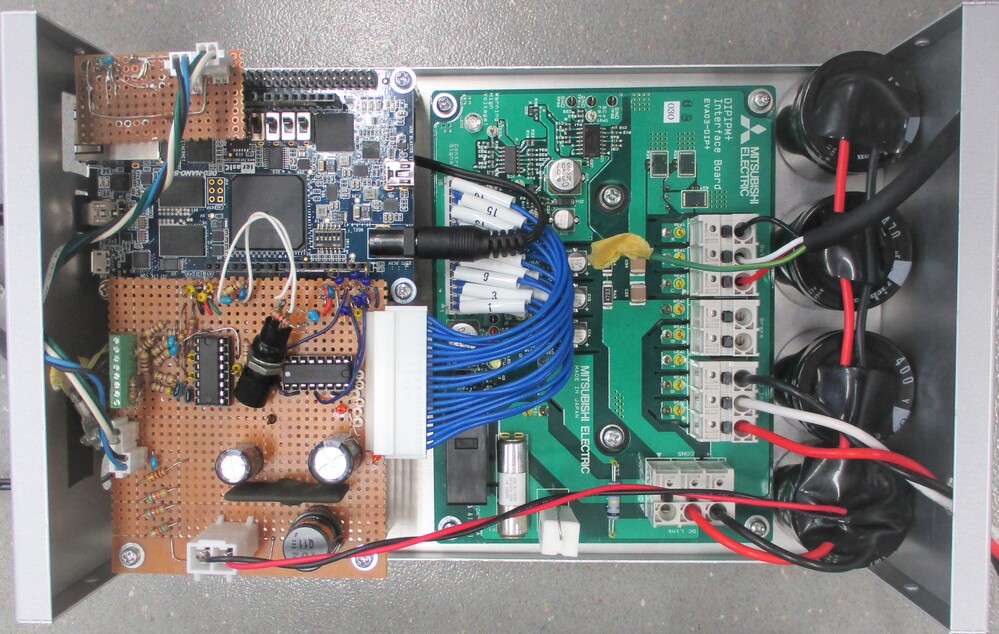
試作したACサーボモータコントローラの回路
サーボコントローラには旧Altera(現Intel)社製ARMマイコン搭載FPGAであるCyclone V SoCの開発用に作られたDE0-Nano-SoCボード(Terasic社)を使用している。
パソコンとの通信は、ボード搭載のUSB-UART変換回路を利用してUARTによるソケット通信を行う。
モータ駆動アンプには、三相コンバータと三相インバータが1モジュールに集積された三菱電機製パワー半導体モジュールDIPIPM+のPSS15MC1FTを使用し、インバータ周辺回路として同社のDIPIPM+評価ボードEVA03-DIP+を用いている。EVA03-DIP+ボードには、三相インバータの各相の電流をセンシングする電流検出抵抗とその信号増幅回路が実装されている。
定格電圧は200V、最大定格電流11A。
リニアスライダでの実験結果
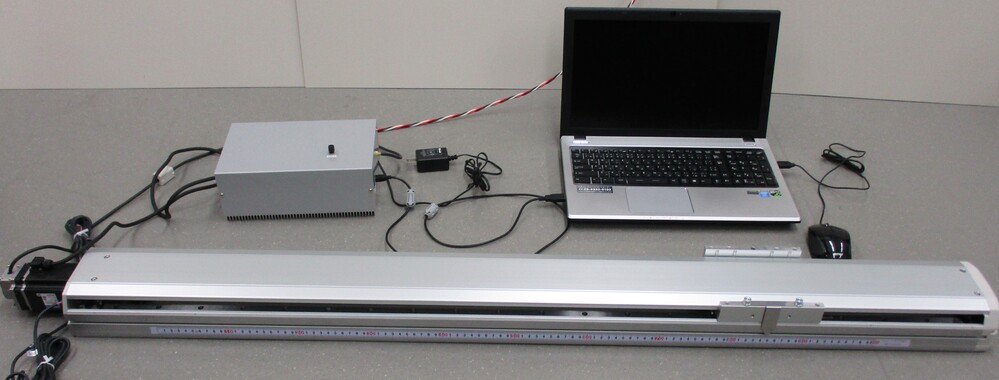
サーボモータ(山洋電気R2AA06040FXS00M)をCKD株式会社製の電動アクチュエータETS-14-10-105-EM4NAANに搭載し、動作試験を行った。モータの最大回転速度はアクチュエータの仕様に合わせるため1500rpmに制限した。
移動距離600mmのとき
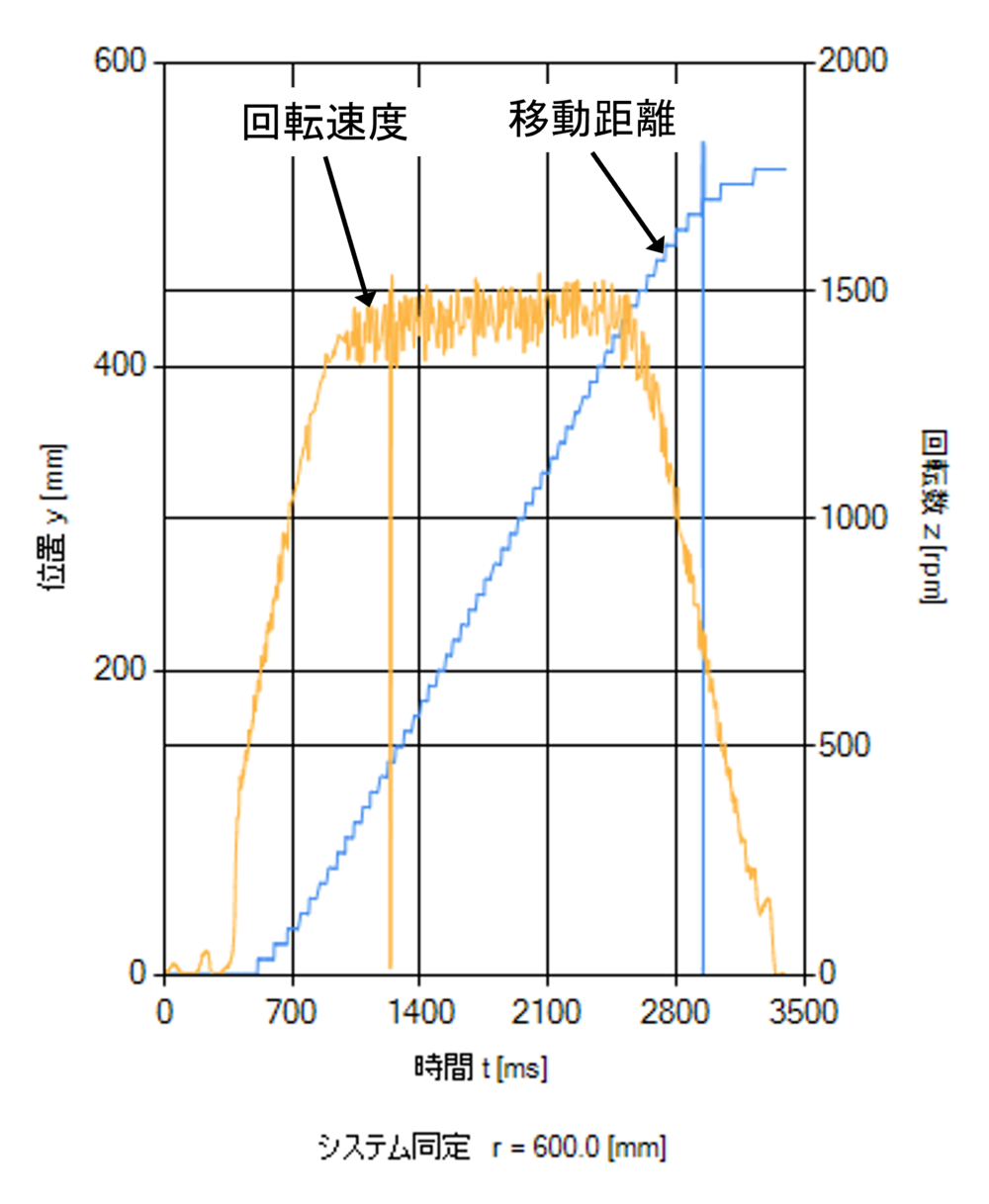
目標移動距離を600mmとしたときのモータ回転速度(回転数z [rpm])及びアクチュエータ移動距離(位置y [mm])の時間変化のグラフを上に示す。
モータ回転速度は緩やかに上昇して、設定した最大速度1500rpmに到達した後しばらく一定になり、その後緩やかに下降しているのが分かる。
最終的な到達位置は500mm付近で、600mmまで至らなかった。これは、加速時に速度指令値の上昇に対して実際の速度が追い付いていないことによって生じたものと考えられ、今後対策が必要と考えられる。
移動距離200mmのとき
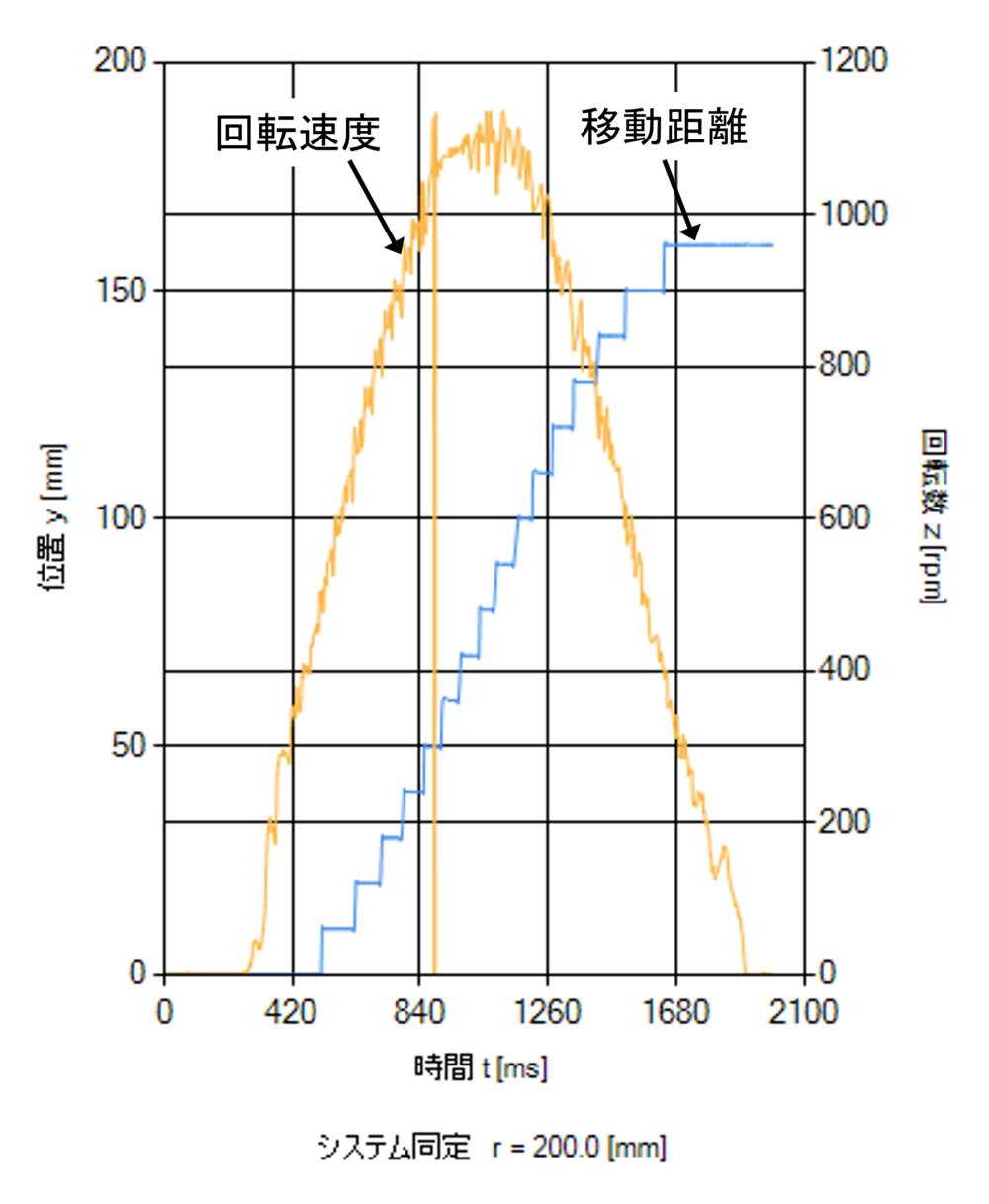
目標移動距離を200mmとしたときのモータ回転速度(回転数z [rpm])及びアクチュエータ移動距離(位置y [mm])の時間変化のグラフを上に示す。
このときのモータ回転速度は、緩やかな軌道で上昇しているが、移動距離が短いため、設定上限値である1500rpmに達することなく、その後緩やかに下降している。
移動距離については、この場合も目標値に対して不足しており、原因は、同様に加速時の速度不足と考えられる。
今後は移動距離不足の問題の解決が必要となる。
担当科
| 所属 | 電話番号 |
|---|---|
| (0852)60−5138 |
